Controle
-
Aula 1 - Início
O que é Controle?
Impor a um sistema (planta/processo) um comportamento desejado.
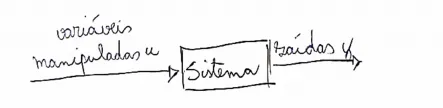
O que é um sistema?
- Parte do universo sobre a qual se dedica particular interesse
- Caracterísicas:
- Recebe informações (entradas -u)
- Reage fornecendo informações (saídas - y)
Quais são os comportamentos desejados?
-
Tipicamente deseja-se que a saída seja guiada para uma certa referência
-
Demais requisitos envolvem velocidade de resposta, precisão, robustez.
-
Exemplo
Exemplo de sistema de controle
- Aquecimento de uma sala inicialmente em 0ºC
Tinicial = 0 ; Tref = 22
- Entrada: Estado da resistência (ligado ou desligado)
- Saída: Temperatura da sala Ts
- Tarefa de controle: Manter Ts em 22º
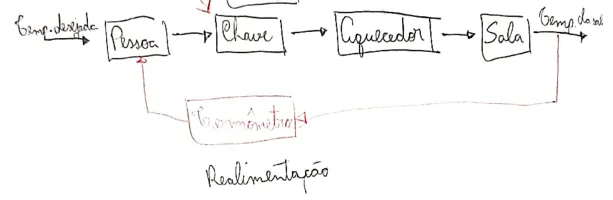
1ª Estratégia: Pessoa liga o aquecedor e vai dormir.

- Estrutura de controle em Malha Aberta: A temperatura real da sala não é utilizada para controlar a entrada da planta (estado da chave).
- Em malha aberta não há realimentação.
2ª Estratégia: Pessoa desliga o aquecedor se Ts > 22ºC e liga se Ts ≤ 22ºC
- Estrutura de controle em Malha Fechada (utiliza realimentação): A temperatura Ts é empregada para escolher o estado da chave (ligado ou desligado).
- PROBLEMA: Pessoa não dorme ☹️
3ª Estratégia: Utilização de relé bimetálico que desliga o aquecedor se Ts>22ºC e liga caso Ts ≤ 22ºC
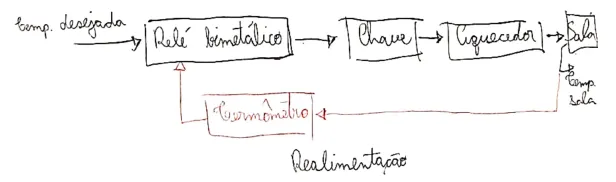
- Estrutura de controle em Malha Fechada, isto é, há realimentação.
Estrutura de sistemas de controle em malha fechada
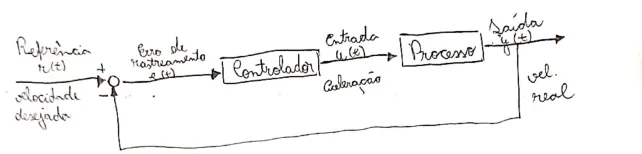
- O controlador pode ser interpretado como uma equação (algébrica ou diferencial) que relaciona o erro de rastreamento com a entrada.
- Como analisar o comportamento do sistema em malha aberta e em malha fechada? Como projetar o controlador?
-
Aula 2 - Sist. lineares e não lineares.
Por onde começamos um projeto de controle?
- Ex.: Controlar o ângulo de ataque (saída) manipulando o profundor (entrada).
- Tipicamente, o primeiro passo é a obtenção de um modelo que descreve o comportamento dinâmico (“equações diferenciais” do sistema.
- Esse procedimento é denominado modelagem.
- Modelos são representações de sistemas (pinturas, esculturas, foto, etc)
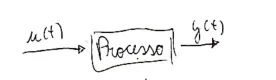
- Na engenharia de controle, modelos matemáticos geralmente são equações diferenciais que descrevem a relação entre u(t) e y(t).
- A modelagem pode ser realizada de diferentes formas:
- Caixa opaca
- Não sabemos a estrutura (núm. de derivadas, variáveis externas do sistema, nem os coeficientes)
- Utilizam-se dados experimentais para determinar um modelo
- Ex.: Refinaria de petróleo
- Caixa translúcida
- Sabemos a estrutura do sistema e queremos determinar os coeficientes.
-
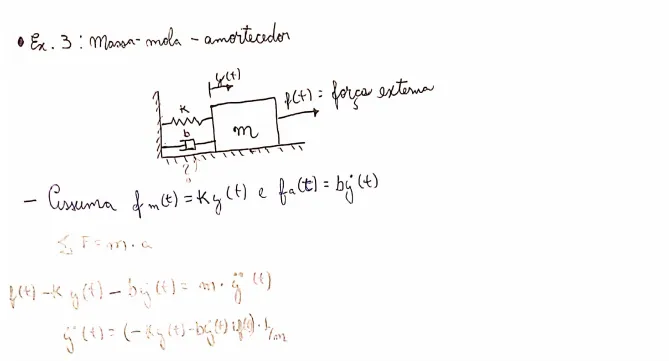
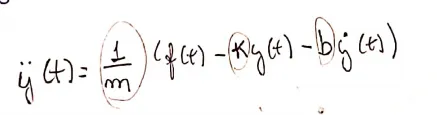
Ex.: Balanço de forças em 1/4 de veículo. Deve-se identificar os coeficientes f e K.
$m\ddot{y}(t) = -f(\dot y(t) - \dot x(t)) -K(y(t) -x(t)$
-
- Sabemos a estrutura do sistema e queremos determinar os coeficientes.
- Caixa transparente
-
Utilizamos as leis físicas que regem a dinâmica do processo para modelar o sistema. Mais ainda, os parâmetros são determinados/medidos de alguma forma.
-
Diferentes técnicas auxiliam nesse processo: Método Lagrangiano, analogia, diagrama de corpo livre, etc…
- Ex1.: Veículo em movimento
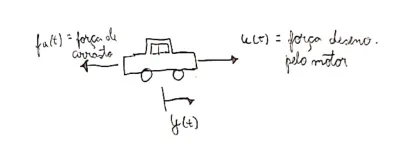
- Assuma $f_a(t) = b\dot y(t)$(
$$ \sum F = ma\m\ddot y(t) = u(t) - f_a(t)= u(t) - b\dot y(t)\\ddot y(t) = {1 \over m} (u(t) - b\dot y(t)) $$
- Ex2.: Pêndulo simples
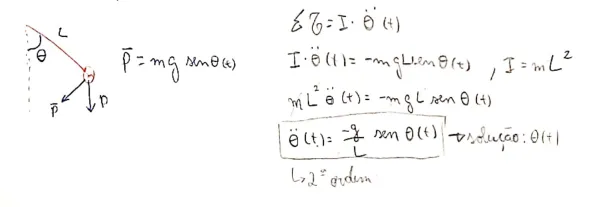
-
A partir do modelo, podemos analisar o comportamento do sistema e projetar o controlador
-
As técnicas de projeto/análise de sistemas que serão estudadas consideram sistemas lineares e invariantes no tempo (SLIT).
-
- Caixa opaca
Sistemas Lineares e Não Lineares
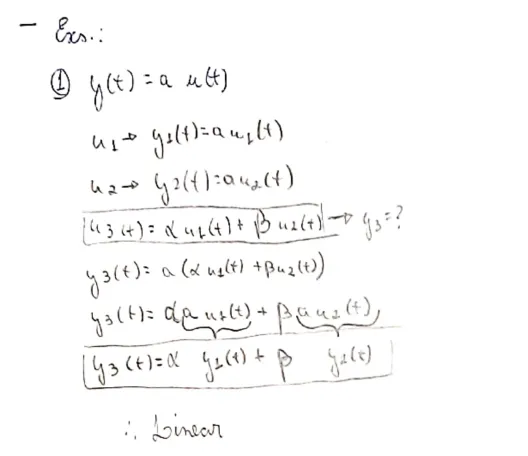
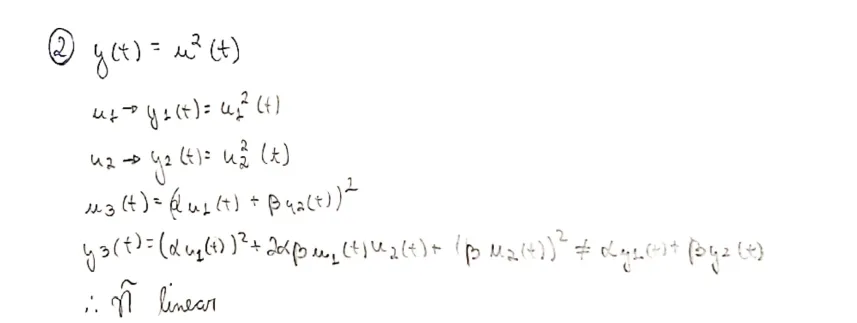
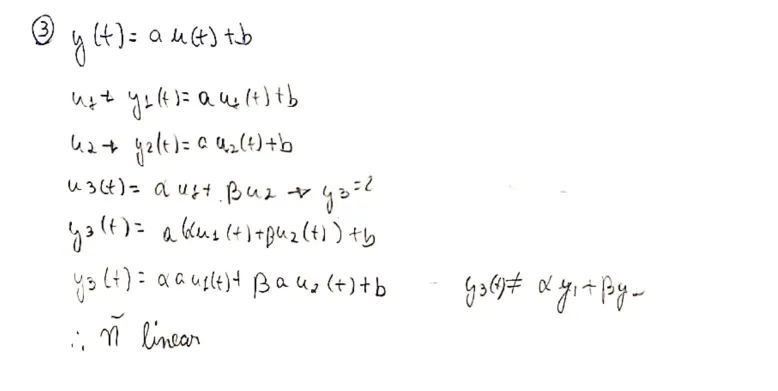
- Um sistema é dito linear se o Princípio da superposição for respeitado
- Princípio da Superposição: Se $u_1(t)$ gerar $y_1(t)$ e $u_2(t)$ resultar em $y_2(t)$, então a aplicação de uma combinação linear dessas entradas $u(t) = \alpha u_1(t) + \beta u_2(t), \forall \alpha\beta\in\reals$, gera uma saída que é a mesma combinação linear de $y_1(t)$ e $y_2(t)$, isto é, $y(t) = \alpha y_1(t) + \beta y_2(t), \forall \alpha\beta\in\reals$.
- Tais propriedades são denominadas atividade e homogeneidade
-
Aula 3 - Sistemas invariantes no tempo
Sistemas invariantes no tempo
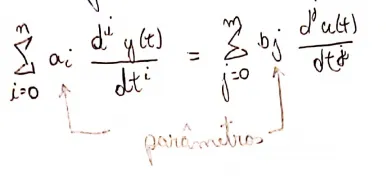
- A forma geral dos sistemas lineares de interesse nesse curso é a seguinte:
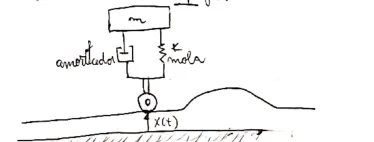
- Exemplo: massa-mola-amortecedor
- Se ai e ou bj (parâmetros do modelo) variarem com o tempo, o sistema é dito variante no tempo, ou SLVT, senão, é denominado invariante (SLIT).
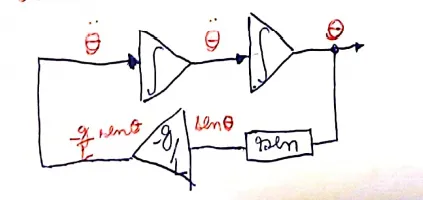
- Exemplo de diagrama de simulação para o exemplo do pêndulo (simulink)