
Trabalho 1
Conteúdos
Nome da Atividade: Pesquisa sobre tipos de robôs
Nome e Matrícula: Lucas Lima do Nascimento - 12111ECP024
Introdução:
Nesse trabalho, trago algumas informações pesquisadas sobre algumas categorias de robôs na disciplina de Robótica. Irei abordar robôs industriais, de serviço e os cobots (robôs colaborativos).
Robôs Industriais:
Um robô industrial é um sistema robótico utilizado para manufatura. São automáticos, programáveis e usualmente capazes de se moverem em três ou mais graus de liberdade.
Nas indústrias, a robótica encontrou um grande mercado e um grande espaço para se desenvolver, estando inclusa nas mais diversas aplicações como soldagem, pintura, montagem e desmontagem, entre outras.
No ano de 2020, estima-se que um total de 1.64 milhões de robôs industriais estivessem em operação de acordo com a IFR. Desde sua origem em 1937, o crescimento exponencial se deu principalmente à sua grande precisão, eliminando a necessidade do retrabalho em inúmeras peças nas linhas de montagem.
Existem comumente 6 tipos de robôs industriais:
- Robôs articulados
- Robôs de coordenadas (cartesianas, cilíndricas ou esféricas)
- Robôs SCARA (Braço Robótico para Montagem de Conformidade Seletiva)
- Robôs Delta
- Manipuladores seriais
- Manipuladores paralelos

Fonte: Industrial Robotics: An Introduction and Beginner’s Guide (rg-robotics.com)
Robôs de Serviço
Os robôs de serviço auxiliam os seres humanos, tipicamente, em performar algum trabalho não desejado (por exemplo, trabalhos repetitivos ou que envolvem ambientes de alta periculosidade). São tipicamente autônomos, mas, podem ser operados por um sistema interno de controle.
Possuem diversas aplicações, tanto industriais e científicas quanto no ambiente doméstico, como por exemplo os robôs de limpeza diária de casa que se popularizam absurdamente nos últimos anos, como pode ser notado no gráfico de popularidade nas pesquisas do Google abaixo:
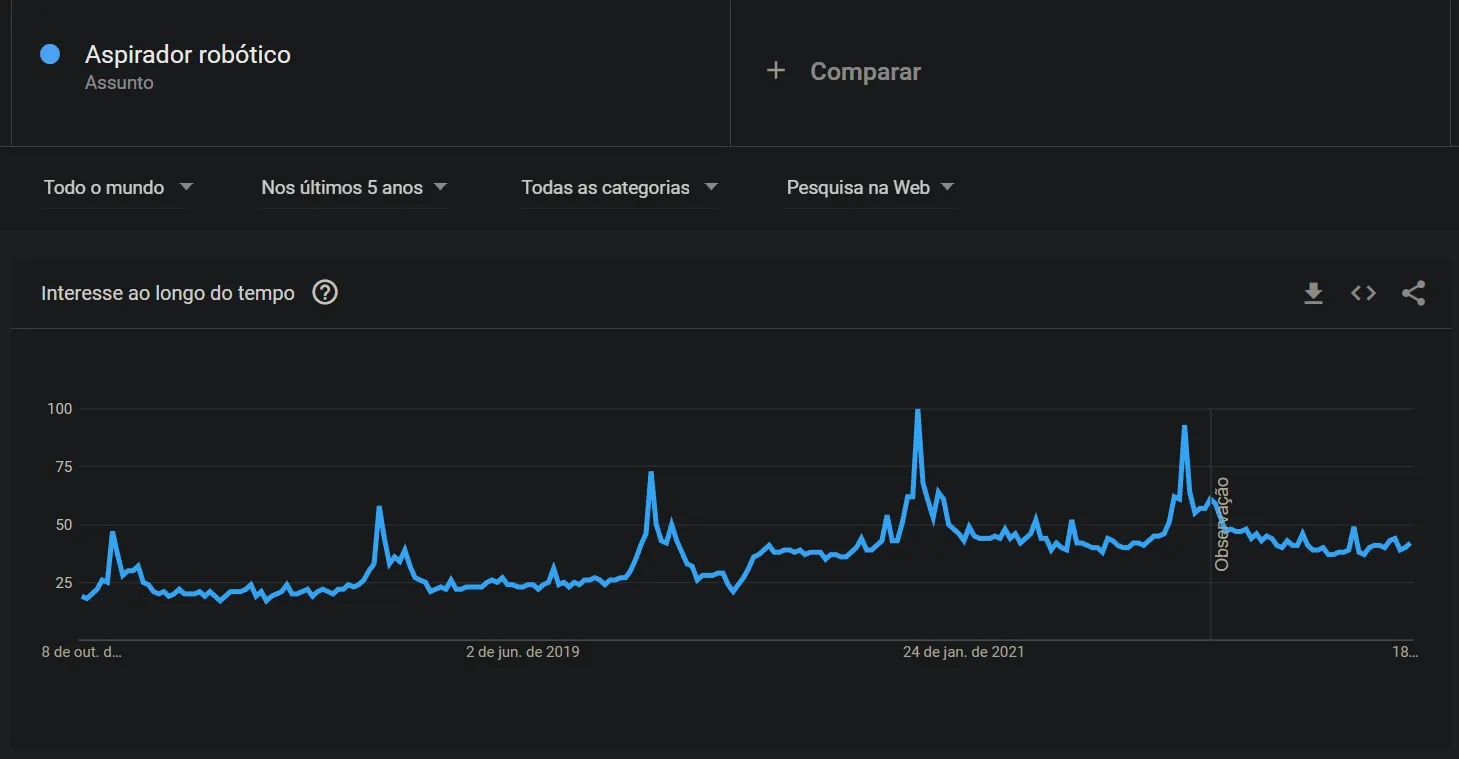
Fonte: Google Trends
Formalizando suas categorias, eles podem ser:
- Industriais
- Robôs de serviço de linha de frente
- Domésticos
- Científicos
Cobots: Robôs colaborativos
Um cobot (ou robô colaborativo) é um robô cuja principal diferença é que sua construção tem como intenção principal a interação direta com um humano em um espaço compartilhado ou em um espaço de proximidade. Contrastam enormemente dos robôs industriais nesse aspecto, já que os robôs industriais normalmente possuem suas áreas isoladas do contato humano para garantir máxima performance. Entretanto, a possibilidade de existência de cobots em um ambiente industrial não é descartada.
O IFR define atualmente 4 níveis de colaboração entre robôs industriais e trabalhadores humanos:
- Coexistência
- Colaboração sequencial
- Cooperação
- Colaboração Responsiva
Na maioria dos casos industriais aplicados hoje, o cobot e o humano compartilham os mesmos espaços mas completam tarefas independentemente ou sequencialmente. Cooperação e Colaboração responsiva são bem menos comuns já que requerem um alto custo ou uma alta sincronia entre operário e robô.
O termo foi fundado em 1996 por J. Edward Colgate e Michael Peshkin, descrevendo um aparato e método de interação física direta entre pessoa e um manipulador de propósito geral controlado por computador.

Fonte da imagem: COBOTS - Robôs colaborativos: quais as vantagens em linha de produção (elcoindustria.com.br)